")
Table des matières:
- Auteur John Day day@howwhatproduce.com.
- Public 2024-01-30 09:09.
- Dernière modifié 2025-01-23 14:46.

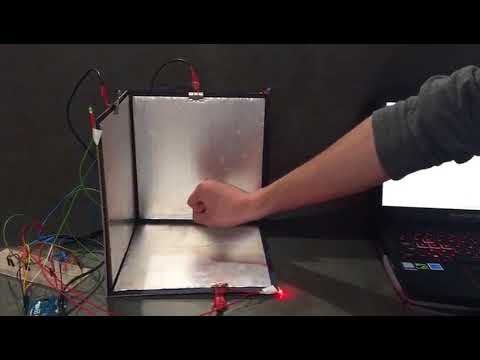

Dans cette instruction est expliqué comment le mouvement d'une main peut être suivi dans un espace 3D en utilisant le principe de la détection capacitive. En modifiant la distance entre une feuille d'aluminium chargée et votre main, la capacité du condensateur variera. Cette méthode peut être utilisée comme une alternative bas de gamme pour les systèmes inertiels et optiques pour suivre le mouvement dans l'espace 3D. Dans ce prototype, nous avons ajouté des LED qui s'allumeront lorsque l'objet se déplacera trop près de la feuille de papier d'aluminium.
Étape 1: Outils et matériaux requis
- Résistance 3x 270k Ohm
- 3 résistances 10k Ohm
- 3x pince crocodile
- 1x LED rouge
- 1x LED bleue
- 1x LED verte
- Résistance 3x 220 Ohms
- Soudure
- Thermorétractable
- Câble blindé
-Arduino Uno
- Feuille d'aluminium
- Papier carton
- Ruban
- Colle en aérosol
- Planche à pain
- Fils de connexion (longueurs variables)
Étape 2: Construire le cadre




Découpez trois carrés de carton (250x250 mm) et trois carrés de papier aluminium (230x230 mm). Appliquez de la colle en aérosol sur un côté de la feuille d'aluminium et appliquez chacune sur les morceaux de carton. Dans ce prototype, les feuilles de papier d'aluminium agiront comme nos capteurs capacitifs. Veillez donc à ce qu'il y ait suffisamment d'espace entre la feuille d'aluminium et le bord du carton, afin qu'il n'y ait pas de contact entre les différentes feuilles de papier une fois le cadre assemblé. Une fois le papier d'aluminium appliqué sur le carton, il est temps d'assembler les trois morceaux de carton à l'aide de ruban adhésif pour compléter le cadre. Encore une fois, assurez-vous qu'il n'y a pas de contact entre les différentes feuilles de papier d'aluminium.
Étape 3: Câblage des fils de blindage à la plaque et à l'Arduino



Il est important d'utiliser un câble blindé pour connecter les feuilles au circuit. L'utilisation de câbles normaux générera un effet d'antenne et interférera avec les lectures de vos capteurs. Assurez-vous d'avoir 3 câbles blindés d'environ 50 cm de long. Prenez un câble, dénudez le fil, coupez les fils de blindage et utilisez uniquement le fil intérieur pour le connecter en soudant le fil à la pince crocodile. Assurez-vous d'appliquer un thermorétractable pour couvrir la connexion de soudure. Fixez les pinces crocodiles à la feuille d'aluminium.
Connectez tous les fils de blindage à la rangée positive de votre maquette. Connectez ensuite cette ligne positive à la connexion 5V de votre Arduino. Retirez maintenant le fil principal du câble blindé et connectez une résistance de 10k Ohm et 220k Ohm en parallèle. Connectez-le au port de sortie de votre Arduino (nous avons utilisé 8, 9 et 10).
Répétez cette étape encore 2 fois pour les autres plans du prototype.
Étape 4: Câblage des LED




Soudez les extrémités des LED à un fil long afin qu'il puisse atteindre les coins des plaques respectives de la carte arduino.
Nous avons utilisé les broches 2, 3 et 4 comme broches de sortie pour nos LED. Cette sortie est connectée à la maquette et connectée à la branche positive de la LED. La branche négative de la LED est ensuite connectée à la résistance de 330 Ohm. L'autre extrémité de la résistance est connectée à la masse de la maquette, qui est connectée à la masse de l'Arduino. Répétez cette opération pour les 3 LED. Dans notre prototype, la LED bleue est connectée au plan Y, la LED rouge au plan Z et la LED verte au plan X. Collez les LED sur les plans correspondants pour obtenir un retour direct lors de l'utilisation du prototype.
Si vous n'utilisez pas de maquette et que vous souhaitez connecter le câble blindé directement à l'Arduino, vous pouvez voir l'image ci-jointe pour un bon aperçu des connexions à souder. Vos connexions finales devraient ressembler à l'image d'aperçu.
Étape 5: Codage
Dans la pièce jointe, nous avons placé le code que nous avons utilisé pour cette expérience. Pour des informations supplémentaires, après chaque commande principale, un commentaire est placé, expliquant ce qui se passe dans le code. Ouvrez le code dans votre logiciel Arduino sur votre PC et téléchargez-le sur votre Arduino. Si vous utilisez un ordinateur portable, assurez-vous qu'il est en charge; sinon votre prototype ne fonctionnera pas.
Étape 6: Utilisation du prototype
Cette méthode de suivi de mouvement 3D est très sensible aux variables environnantes. Par conséquent, assurez-vous de calibrer les valeurs du code en fonction de votre propre situation. Vous pouvez simplement utiliser le moniteur série pour obtenir les bonnes valeurs. Astuce: vous pouvez construire vous-même un étalonnage, où il prend les valeurs moyennes + 10 % lors de l'exécution du code. La vidéo montre comment le prototype doit fonctionner correctement.
Conseillé:
Suivi de mouvement avec MPU-6000 et Arduino Nano : 4 étapes

Suivi de mouvement à l'aide de MPU-6000 et d'Arduino Nano : MPU-6000 est un capteur de suivi de mouvement à 6 axes qui intègre un accéléromètre à 3 axes et un gyroscope à 3 axes. Ce capteur est capable de suivre efficacement la position et l'emplacement exacts d'un objet dans le plan tridimensionnel. Il peut être employé i
Moteur en mouvement avec suivi oculaire : 8 étapes

Moteur en mouvement avec suivi oculaire : Actuellement, les capteurs de suivi oculaire sont plus courants dans divers domaines, mais commercialement, ils sont plus connus pour les jeux interactifs. Ce tutoriel n'a pas la prétention d'élaborer les capteurs car il est très complexe et du fait de son utilisation de plus en plus courante le
Suivi de mouvement avec MPU-6000 et Raspberry Pi : 4 étapes

Suivi de mouvement à l'aide de MPU-6000 et Raspberry Pi : MPU-6000 est un capteur de suivi de mouvement à 6 axes qui intègre un accéléromètre à 3 axes et un gyroscope à 3 axes. Ce capteur est capable de suivre efficacement la position et l'emplacement exacts d'un objet dans le plan tridimensionnel. Il peut être employé i
Pochoirs multi-couleurs complets avec sortie variable : 12 étapes (avec images)
")
Pochoirs multi-couleurs complets avec sortie variable : les pochoirs réalistes en couleurs multicouches ne sont pas tous rapides et faciles. Bien sûr, vous pouvez en lancer un en une heure, mais il faut du temps et de la pratique pour pouvoir répéter le processus et savoir comment le modifier pour chaque pochoir différent. Dans ce instructable, je w
Sortie à contrôle de mouvement - À partir d'une lumière à détection de mouvement : 6 étapes

Sortie à contrôle de mouvement - À partir d'une lampe à détection de mouvement : Imaginez que vous êtes un trick-or-treater allant à la maison la plus effrayante du bloc. Après avoir dépassé toutes les goules, fantômes et cimetières, vous arrivez enfin au dernier chemin. Vous pouvez voir les bonbons dans un bol devant vous ! Mais soudain, un gho