: 5 étapes")
Table des matières:
- Auteur John Day day@howwhatproduce.com.
- Public 2024-01-30 09:09.
- Dernière modifié 2025-01-23 14:46.


Bienvenue dans un nouveau projet!!!
Tout d'abord, je voulais vraiment faire des yeux effrayants comme ils le font pour les costumes et Halloween. J'adore les effets spéciaux et je voulais apprendre et construire mes propres yeux animatroniques en utilisant un arduino, des servos et des balles de ping-pong.
Étape 1:
Rassembler des fournitures…
2 servomoteurs (j'y suis allé avec le moins cher possible dans un magasin Hobby Town)
arduino uno (fruit de l'ada)
bielles (Hobby Town)
2 demi-arbres (Hobby Town)
2 balles de ping-pong
connecteurs (Hobby Town)
Tête en polystyrène (Michaels)
autres articles divers…
Étape 1: Étape 2: Peindre les yeux


Pour l'étape 2, je voulais aller de l'avant et peindre les globes oculaires, ce que j'ai fait moi-même. Oui, ils sont légèrement décalés mais de loin, ils ont fière allure ! Si vous avez des questions sur la peinture que j'ai utilisée, commentez ci-dessous et demandez:)
Faire les yeux:
Les matériaux nécessaires:
4 petits pinceaux fins
Peinture
essuie-tout
Pour faire les yeux, vous commencez avec deux balles de ping-pong et honnêtement, coupez-les simplement en deux avec un couteau exacto ou un cutter. Ensuite, peignez-les d'abord avec une base blanche pour masquer les imperfections. Après cela, commencez à superposer la couleur des yeux que vous essayez d'accomplir. Pour le mien j'ai utilisé du vert et du bleu. Ma palette de couleurs était le vert, le bleu, le blanc et le noir.
Étape 2: Étape 3: Assembler la base


Étape 3: Assembler la base
Les matériaux nécessaires:
feuilles acryliques
morceau de métal au hasard
des vis
demi-arbres
scie à ruban (non requise)
J'ai d'abord découpé la forme et la taille que je voulais dans une feuille acrylique. J'ai ensuite découpé les supports métalliques juste à partir d'un morceau de métal. Une fois que je les ai placés là où je les voulais, j'ai percé les trous pour les vis et connecté les supports à la base comme indiqué ci-dessus dans l'image. Pour l'un de mes servos, j'ai dû découper un petit rectangle pour m'assurer qu'il s'y adapte. C'était pour s'assurer que les liaisons et tout étaient correctement alignés.
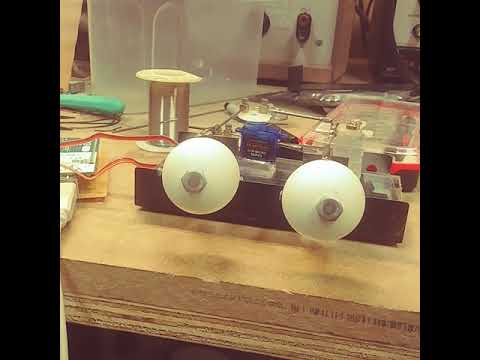
Étape 3: Étape 4: Placer les servos et les liaisons



Étape 4: Placer les servos et les tringleries
Les matériaux nécessaires:
2 servos
liens
petits carrés acryliques coupés
des vis
connecteurs
Pour l'étape 4, j'ai placé où tout va aller et je l'ai disposé. Pour m'assurer que tout est assis uniformément et enseigné, j'ai dû placer de petits morceaux d'acrylique découpés sous l'un des servos. J'ai dû mettre la même quantité de pièces sous la tringlerie reliant l'œil au servo. Après ce sont tous les endroits et la colle (quel que soit votre choix tant qu'il colle), vous pouvez connecter les yeux aux liens et aux servos. Un gros plan de ceci est montré ci-dessus dans l'image 4. Juste une note latérale lors du placement des servos et des liens, le servo le plus proche des yeux doit être relevé ainsi que le lien juste à côté. C'est parce que l'un tire sur l'axe x et l'autre tire sur l'axe y. C'est l'étape la plus importante et certaines choses devront peut-être être modifiées même après avoir tout connecté.:)
Étape 4: ÉTAPE DE CODE


Ajout du code à l'arduino !! Place ci-dessus sont des images du code utilisé pour ces yeux. J'ai ajouté un joystick d'un contrôleur PS1 pour contrôler la façon dont les yeux sont contrôlés.
Étape 5: Étape 5: la tête




Cette étape est facultative et prend du temps.
Étape 5: faire la tête
Les matériaux nécessaires
Tête en polystyrène
couteau exacto
pistolet à colle chaude
Maintenant, pour cette étape, elle est facultative et a pris du temps. Cela m'a probablement pris 2 heures. Malheureusement, mon partenaire dans le crime a accidentellement abandonné le projet et s'est cassé la tête après que j'aie terminé. Quoi qu'il en soit, pour cela, je viens de comprendre à quelle profondeur je devais découper du bas comme du haut. La partie la plus importante est les yeux dont ils ont besoin de suffisamment d'espace pour se déplacer et aller en cercle, comme vous pouvez le voir sur la photo 5. La base en acrylique que j'ai choisi de faire dépassait sur le côté comme vous pouvez le voir sur la photo 6. Cela peut être couvert par des cache-oreilles ou quelque chose d'amusant comme une perruque à votre convenance !
Alors TADDAAAAA !!!!!! vous avez complètement terminé avec ce projet.
J'espère que cela vous plaira et commentez ci-dessous si vous avez des questions ou quoi que ce soit, demandez simplement:)
Conseillé:
Comment faire fonctionner des servomoteurs à l'aide de Moto:bit avec Micro:bit : 7 étapes (avec photos)
")
Comment faire fonctionner des servomoteurs à l'aide de Moto:bit avec Micro:bit : Une façon d'étendre les fonctionnalités du micro:bit consiste à utiliser une carte appelée moto:bit de SparkFun Electronics (environ 15-20 $). Il a l'air compliqué et possède de nombreuses fonctionnalités, mais il n'est pas difficile de faire fonctionner des servomoteurs à partir de celui-ci. Moto:bit vous permet de
Yeux animatroniques avec télécommande : 5 étapes

Yeux animatroniques avec télécommande : il s'agit d'une instruction sur la façon de créer des yeux animatroniques qui peuvent être contrôlés à distance à partir d'un ordinateur via WiFi. Il utilise un minimum de composants électroniques, pas de PCB et nécessite un minimum de soudure. Vous pouvez le contrôler à partir du clavier du PC, vous n'avez donc pas besoin d'un e
Masque King Kong aux yeux animatroniques : 4 étapes (avec photos)
")
Masque de King Kong avec des yeux animatroniques : cette instructable montre comment faire un masque avec des yeux mobiles réalistes. Ce projet nécessite les compétences suivantes qui ne sont pas couvertes en détails :
Contrôle de 3 servomoteurs avec 3 potentiomètres et un Arduino : 11 étapes (avec photos)
")
Contrôler 3 servomoteurs avec 3 potentiomètres et un Arduino : Bonjour. Il s'agit de mon premier instructable, donc j'espère que vous serez patient avec moi si je fais des erreurs en le mettant en place. Il est écrit pour les débutants, donc les plus avancés d'entre vous peuvent sauter beaucoup de choses et juste commencer à le câbler. L'objectif que je me suis fixé
Robot humanoïde basé sur Arduino utilisant des servomoteurs : 7 étapes (avec photos)
")
Robot humanoïde basé sur Arduino utilisant des servomoteurs : Bonjour à tous, Ceci est mon premier robot humanoïde, fabriqué à partir d'une feuille de mousse PVC. Il est disponible en différentes épaisseurs. Ici, j'ai utilisé 0,5 mm. À présent, ce robot peut simplement marcher lorsque je l'allume. Maintenant, je travaille sur la connexion d'Arduino et de Mobile via Bluetooth