![[vPython] Simulateur de robot araignée : 4 étapes](https://i.howwhatproduce.com/images/003/image-8663-22-j.webp "[vPython] Simulateur de robot araignée : 4 étapes")
Table des matières:
- Auteur John Day day@howwhatproduce.com.
- Public 2024-01-30 09:09.
- Dernière modifié 2025-01-23 14:46.


Si vous trouvez mon design intéressant, vous pouvez faire un petit don:
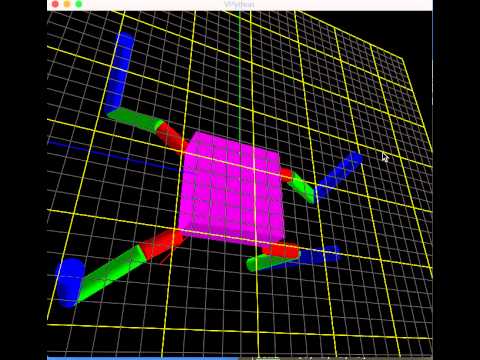
J'utilise vPython pour simuler les actions de mon robot Spider. Cela facilitera le développement de vos propres actions d'intérêt sur pc/mac, puis le portage sur arduino.
Il y a le vrai robot instructable si cela vous intéresse
www.instructables.com/id/DIY-Spider-RobotQu…
VPython est le langage de programmation Python plus un module graphique 3D appelé "visuel" créé par David Scherer en 2000. VPython facilite la création d'affichages et d'animations 3D navigables, même pour ceux qui ont une expérience de programmation limitée. Parce qu'il est basé sur Python, il a également beaucoup à offrir aux programmeurs et chercheurs expérimentés.
Étape 1: Installez VPython et l'éditeur


installer python, je suggère d'utiliser 2.7.x
www.python.org/
puis vpython
vpython.org/
et, mon éditeur préféré - PyCharm
www.jetbrains.com/pycharm/
Étape 2: Téléchargez le code et exécutez

Téléchargez le code et ouvrez-le avec PyCharm, exécutez le code et vous verrez un robot araignée 3D fantaisie sur l'écran, et vous pouvez utiliser la souris avec le bouton du milieu pour zoomer/dézoomer, le bouton droit pour faire pivoter.
Étape 3: développez vos actions dans ce simulateur
Ce sera amusant si vous pouvez développer des actions plus intéressantes et partager avec moi.
Étape 4: Télécommande au robot Real Spider
Que diriez-vous de contrôler le vrai robot par python pensé bluetooth ? vous voudrez peut-être déjà essayer la voie. Je le posterai plus tard si quelqu'un en a besoin.
Conseillé:
Bricolage -- Comment faire un robot araignée qui peut être contrôlé à l'aide d'un smartphone à l'aide d'Arduino Uno : 6 étapes

Bricolage || Comment faire un robot araignée qui peut être contrôlé à l'aide d'un smartphone à l'aide d'Arduino Uno : Tout en créant un robot araignée, on peut apprendre tellement de choses sur la robotique. Dans cette vidéo, nous allons vous montrer comment fabriquer un robot Spider, que nous pouvons faire fonctionner à l'aide de notre smartphone (Androi
SIMULATEUR DE JEU DE COURSE DIY -- SIMULATEUR F1 : 5 étapes

SIMULATEUR DE JEU DE COURSE DIY || SIMULATEUR F1 : Bonjour à tous Bienvenue sur ma chaîne, aujourd'hui, je vais vous montrer comment je construis un "Simulateur de jeu de course" avec l'aide d'Arduino UNO. ce n'est pas un blog de construction, c'est juste un aperçu et un test du simulateur. Blog de construction complète à venir bientôt
"Miles" le robot araignée quadrupède : 5 étapes

"Miles" le robot araignée quadrupède : basé sur Arduino Nano, Miles est un robot araignée qui utilise ses 4 pattes pour marcher et manœuvrer. Il utilise 8 servomoteurs SG90 / MG90 comme actionneurs pour les jambes, se compose d'un PCB personnalisé conçu pour alimenter et contrôler les servos et l'Arduino Nano.PCB a dedic
Robot araignée quadrupède - GC_MK1 : 8 étapes (avec photos)
")
Robot araignée quadrupède - GC_MK1 : Le robot araignée alias GC_MK1 avance et recule et peut également danser en fonction du code chargé sur l'Arduino. Le robot utilise 12 micro servomoteurs (SG90); 3 pour chaque jambe. Le contrôleur utilisé pour contrôler les servomoteurs est un Arduino Nan
Comment connecter l'émetteur FlySky à n'importe quel simulateur PC (Simulateur ClearView RC) -- Sans câble : 6 étapes
 -- Sans câble : 6 étapes")
Comment connecter l'émetteur FlySky à n'importe quel simulateur PC (Simulateur ClearView RC) || Sans câble : Guide pour connecter FlySky I6 avec un ordinateur pour simuler le vol pour les débutants d'avions à voilure. La connexion de simulation de vol à l'aide de Flysky I6 et Arduino ne nécessite pas l'utilisation de câbles de simulation