")
Table des matières:
- Auteur John Day day@howwhatproduce.com.
- Public 2024-01-30 09:07.
- Dernière modifié 2025-01-23 14:46.



Salut les gars..
Avez-vous déjà erré pour créer un labyrinthe qui peut être contrôlé à partir de votre smartphone Android ….!
Eh bien, vous êtes au bon endroit. J'en ai construit un pour moi-même en utilisant Arduino et Android.
Ne vous inquiétez pas, c'est facile,.. Dans ce projet, je vais vous montrer comment faire:
1. Labyrinthe Board (je l'ai fabriqué à partir de vieilles boîtes en bois qui traînent).
2. Application Android dans l'inventeur de l'application pour contrôler le tableau.
3. Écrire le programme en Arduino pour contrôler la carte et
4. Mise en place du circuit ….
Vous pourrez ensuite utiliser le concept appris dans d'autres projets que vous construirez.
Alors sans perdre plus de temps, commençons….!
Étape 1: Rassembler les composants



Pour ce projet, vous aurez besoin des éléments suivants:
1. Deux servomoteurs (j'ai utilisé des mini et ils ont fonctionné pour moi).
2. Arduino Uno. (Je suggère de l'acheter chez snapdeal, c'est un clone mais vaut chaque centime que j'ai dépensé)
3. Un module Bluetooth.
4. Une planche à pain.
5. Quelques fils de liaison
6. Planches fines en bois ou dures
7. clous, quelques tiges de touches de vieux claviers
8. Thermocol (Polystyrène)
Étape 2: faire le tableau du labyrinthe



C'est la partie mécanique du projet.
Tout d'abord pour la base, prenez un long morceau rectangulaire de planche de bois ou de carton. il doit être plus grand que la planche inclinable réelle.
Coupez deux petites tailles égales de bois cuboïde..
et ajoutez un clou à chacun, de telle manière qu'ils soient alignés à la même hauteur de la base. Coupez également un morceau de bois supplémentaire pour l'ajouter comme support aux piliers.
maintenant pour la planche du haut..
faire un cadre plus petit que la base, ce sera notre axe x, sur la face extérieure des petits bords du cadre faire de petits trous exactement au centre des bords. coupez les tiges en deux et collez-les sur les grands bords du cadre tournés vers l'intérieur. coupez-les en deux avant de le faire.
cela maintiendra la planche supérieure sur le cadre et aidera à la rotation.
ajoutez maintenant les piliers aux trous extérieurs pour que le cadre repose sur la base.
collez les piliers à la base et fixez-y également les supports.
maintenant pour ajouter les servomoteurs.
un sera attaché à la base et sera attaché au cadre à l'aide d'une petite tige pour faire pivoter le cadre
un autre sera attaché au cadre et sera attaché à la planche supérieure à l'aide d'une petite tige pour faire pivoter la planche supérieure.
les servos doivent être montés perpendiculairement les uns aux autres comme indiqué sur les photos.
maintenant le tableau est prêt.
J'ai fait le labyrinthe en utilisant du thermocol et un carton.
Étape 3: Configuration du circuit

Configurez le circuit comme indiqué sur la photo…
N'oubliez pas que pour les servos que j'utilise, le fil rouge est positif, le marron est négatif et l'orange est le signal.
module Bluetooth
Rx va à la broche 1
Tx va à la broche 0
Le fil de signal du servo de base va à la broche 5
Le fil de signal du servo de cadre va à la broche 6
N'oubliez pas d'ajouter une alimentation supplémentaire pour le servo et le module bluetooth.. Sinon, le module n'aura pas assez de courant et continuera à se déconnecter, affichant l'erreur 516. J'ai eu beaucoup de mal à le dépanner et enfin à comprendre le problème et la solution.
Étape 4: Création de l'application

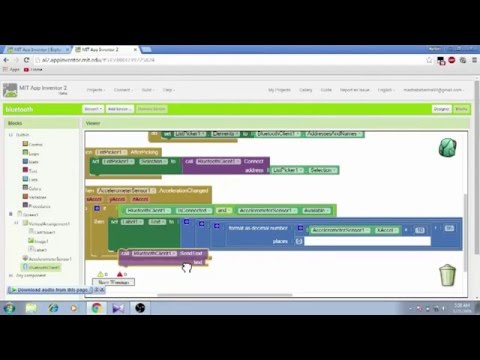

D'accord, tout d'abord, vous devez vous connecter à l'inventeur de l'application pour créer des applications.
allez sur
et cliquez sur Créer une application ! dans le coin supérieur droit, inscrivez-vous et vous êtes prêt à partir….
Tout le reste que j'ai montré dans la vidéo.. jetez un oeil.
voici la base:
lorsque l'écran est initialisé dans l'application (qui dans ce cas est Screen1), -l'accelerometerSensor est activé et la sensibilité est réglée au maximum c'est-à-dire 3.
maintenant, quand nous appuyons sur le sélecteur de liste
-une liste apparaît, répertoriant les appareils couplés.
(vous devrez appairer le module avant d'ouvrir l'application, comme d'habitude le code d'appairage est 1234)
Maintenant, avant de choisir le sélecteur de liste, -définir la liste avec les appareils jumelés et leurs adresses
Après avoir sélectionné l'appareil
-l'adaptateur bluetooth se connectera avec l'appareil sélectionné
Maintenant le module est connecté
Maintenant, lorsque les données acclerometerSensor sont modifiées
-Ajoutez les données au texte de l'étiquette et envoyez-les avec l'envoi Bluetooth.
Maintenant, la partie délicate est d'envoyer les deux données à la fois
# les données de l'accléromètre vont de 0 à 9,5 lorsqu'il est incliné à gauche et de 0 à -9,5 lorsqu'il est incliné à droite, il en va de même lorsque le téléphone est incliné vers le bas et vers le haut.
nous avons donc des données d'inclinaison des axes x et y que nous devons envoyer…
laissez les données de l'axe x être X et l'axe y être Y
donc ce que j'ai fait c'est ça:
Text="(X*10(supprimer les virgules après cela)+95)*1000(multiplier par 1000)+Y*10(supprimer les virgules)+95"
alors maintenant, les données vont de 0 à 190 pour chaque axe et sont ajoutées pour faire 190180 où les 3 premiers chiffres sont l'axe x et les 3 derniers sont les coordonnées de l'axe y…
qui sera envoyé au module bluetooth et sera décomposé en données réelles et en carte avec les angles de rotation du servo en code arduino…
Étape 5: écriture du code Arduino


Une fois l'application terminée, commençons par le code. J'ai téléchargé le code, téléchargez-le, compilez-le et envoyez-le à l'arduino, mais attendez avant d'envoyer le code, détachez les broches rx et tx du module bluettoh de la carte arduino.. et envoyez le code après cela, vous pouvez attacher les broches.
le code qui est reçu du bluetooth est une chaîne qui a nos données d'axe..
maintenant Serial.parseInt(); est utilisé pour lire la chaîne et convertir la chaîne en int dans une variable pos.
maintenant pos a une valeur = 190180 (disons) notre objectif est maintenant de déchiffrer les données, c'est-à-dire de supprimer l'axe x et les coordonnées y
pour l'axe x. divisez la valeur par 1000, cela donnera 190, c'est-à-dire valeur/1000 = 190
et pour l'axe des y modulaire, divisez la valeur par 1000, ce qui nous donnera 180, c'est-à-dire la valeur%1000 = 180
calculez maintenant la position max et min des servos que vous voulez pour incliner la planche, … dans mon cas ses 180 et 75 et ….
maintenant nous avons coordonné les axes x et y, il ne nous reste plus qu'à mapper les coordonnées avec les angles de rotation min et max que nous voulons pour nos servos….
voir le code pour plus de détails.
Et nous avons terminé… téléchargez le code, ouvrez l'application, connectez-vous et jouez….
Savez-vous que Google en a un pour lui-même et qu'il s'agit d'un très grand labyrinthe que vous n'avez jamais vu… ce qui est aussi ma motivation pour en créer un pour moi-même.
Alors jusqu'à la prochaine fois, amusez-vous bien..
Conseillé:
Contrôleur de jeu Arduino Rhythm (pour mon propre jeu): 6 étapes
: 6 étapes")
Contrôleur de jeu de rythme Arduino (pour mon propre jeu) : dans ce instructable, je vais vous montrer comment je construis ce contrôleur de jeu de rythme à partir de zéro. Cela implique des compétences de base en menuiserie, des compétences de base en impression 3D et des compétences de base en soudure. Vous pouvez probablement construire ce projet avec succès si vous n'avez aucun ex
Contrôleur de jeu DIY basé sur Arduino - Contrôleur de jeu Arduino PS2 - Jouer à Tekken avec la manette de jeu DIY Arduino : 7 étapes

Contrôleur de jeu DIY basé sur Arduino | Contrôleur de jeu Arduino PS2 | Jouer à Tekken avec la manette de jeu DIY Arduino : Bonjour les gars, jouer à des jeux est toujours amusant, mais jouer avec votre propre contrôleur de jeu personnalisé DIY est plus amusant. Nous allons donc créer un contrôleur de jeu utilisant arduino pro micro dans cette instructables
Contrôleur de jeu Arduino avec lumières répondant à votre jeu Unity :: 24 étapes

Contrôleur de jeu Arduino avec des lumières répondant à votre jeu Unity :: Tout d'abord, j'ai écrit cette chose en mots. C'est la première fois que j'utilise instructable, donc chaque fois que je dis : écrivez le code comme si sachez que je fais référence à l'image en haut de cette étape. Dans ce projet, j'utilise 2 arduino pour exécuter 2 bits séparés
Console de jeu Arduino Pocket + A-Maze - Jeu de labyrinthe : 6 étapes (avec photos)
")
Arduino Pocket Game Console + A-Maze - Maze Game : Bienvenue dans mon premier instructable ! Le projet que je veux partager avec vous aujourd'hui est le jeu de labyrinthe Arduino, qui est devenu une console de poche aussi performante qu'Arduboy et des consoles similaires basées sur Arduino. Il peut être flashé avec mes (ou vos) futurs jeux grâce à expo
Jeu de plateforme contrôlé par Arduino avec joystick et récepteur IR : 3 étapes (avec photos)
")
Jeu de plateforme contrôlé par Arduino avec joystick et récepteur IR : aujourd'hui, nous allons utiliser un microcontrôleur Arduino pour contrôler un simple jeu de plateforme basé sur C#. J'utilise l'Arduino pour prendre l'entrée d'un module de manette de jeu et envoyer cette entrée à l'application C # qui écoute et décode l'entrée sur un Serial c