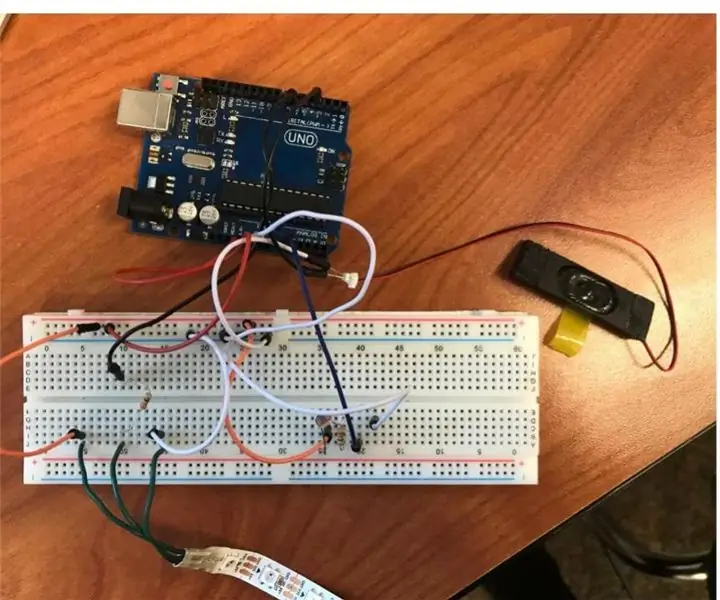
Contrôler la vitesse de Jingle Bells avec Arduino : ce Instructable vous montrera comment programmer une bande LED pour correspondre aux notes jouées par l'Arduino. Vous pouvez également accélérer ou ralentir la chanson en rapprochant ou en éloignant votre main de la photorésistance. Mon exemple est avec la chanson J. Dernière modifié: 2025-01-23 14:01
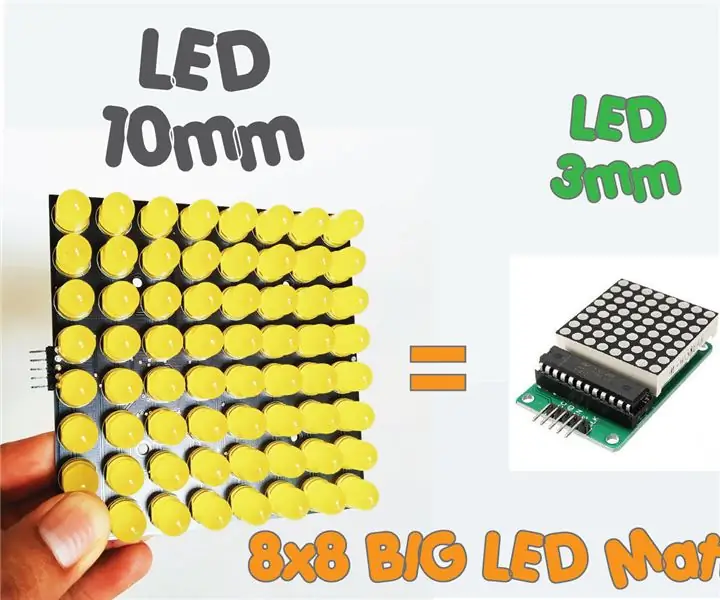
Comment construire une matrice LED 8x8 BIG (MAX7219 LED 10mm): Avez-vous travaillé avec une matrice LED 8x8 prête à l'emploi comme écrans? Ils existent en différentes tailles et sont assez intéressants à travailler. Une grande taille facilement disponible est d'environ 60 mm x 60 mm. Cependant, si vous recherchez une matrice LED prête à l'emploi beaucoup plus grande. Dernière modifié: 2025-01-23 14:01
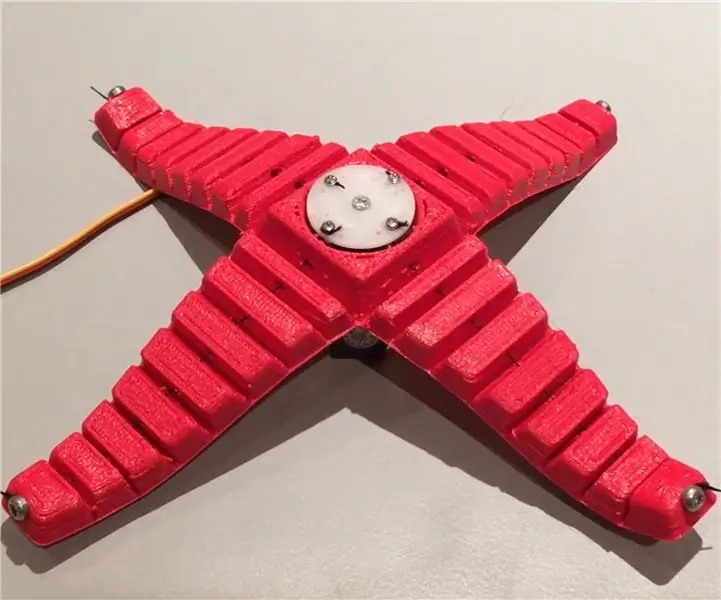
Pince robotique à imprimer sur place : la robotique est un domaine fascinant, et nous avons la chance de vivre à une époque où la communauté de la robotique DIY produit des travaux et des projets incroyables. Alors que bon nombre de ces projets sont incroyablement avancés et innovants, j'ai cherché à faire des robots t. Dernière modifié: 2025-01-23 14:01

DIY Dayton Audio Mini Bluetooth Speaker 1" CE32A W/Oak Case: Dès le premier projet que j'ai commencé, j'avais toujours voulu faire des haut-parleurs Bluetooth. Je n'étais pas doué en électricité, alors j'ai commencé mes recherches et regardé des heures et des heures de Des centaines de projets plus tard, je me sentais enfin assez à l'aise pour commencer. Dernière modifié: 2025-01-23 14:01

KiKi the Keyboard Bot : J'ai assez souvent besoin de me connecter à mon PC depuis le travail, mais je n'aime pas le laisser allumé tout le temps. Le problème est que mon ancien PC ne prend pas en charge WOL. Il peut cependant être mis en veille et réveillé avec la touche marche/arrêt du clavier. Mais sans personne à la maison. Dernière modifié: 2025-01-23 14:01
Camera Slider Labview: El proyecto consiste en una base para cámara, comercialmente conocido como "Dolly", este sistema cuenta con una base que sostiene una cámara, ya sea de cualquier tipo de la linea GoPro Hero. Esta base va montada sobre dos rieles de acero los cuales. Dernière modifié: 2025-01-23 14:01

Photomaton de mariage Arduino - Pièces imprimées en 3D, automatisées et à petit budget : j'ai récemment été invité au mariage du frère de mon partenaire et ils m'ont déjà demandé si nous pouvions leur construire un photomaton car ils coûtaient trop cher à louer. C'est ce que nous avons trouvé et après plusieurs compliments, j'ai décidé d'en faire un. Dernière modifié: 2025-01-23 14:01
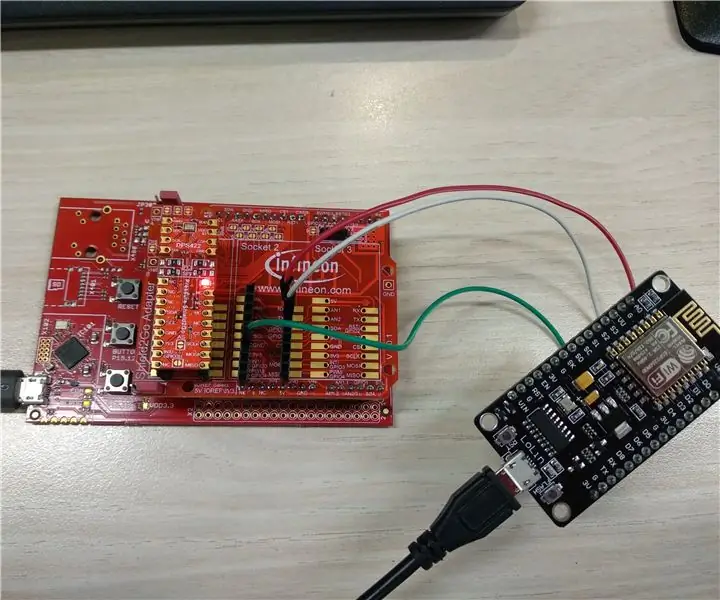
Interfaçage du capteur Infineon DPS422 avec Infineon XMC4700 et envoi de données à NodeMCU : dans ce didacticiel, nous allons apprendre à utiliser le DPS422 pour mesurer la température et la pression barométrique avec XMC4700.DPS422 consommation. Dernière modifié: 2025-01-23 14:01

Open Autoclave : a Humanitarian Maker Project : Pourquoi ai-je réalisé ce projet ? J'ai lu un rapport de l'Organisation mondiale de la santé qui dit que 3 milliards de personnes dans le monde vivent dans des zones rurales sans électricité fiable et que, à cause de cela, elles ne peuvent souvent pas accéder à soins chirurgicaux. La raison en est que. Dernière modifié: 2025-01-23 14:01
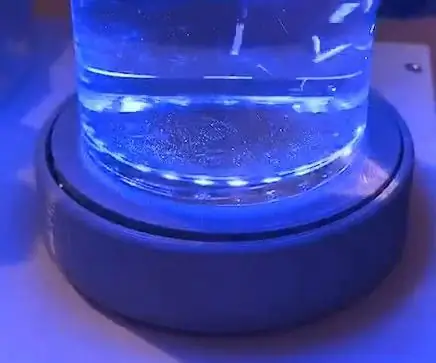
Capteur de poids Coaster : ce Instructable vous permettra de construire un sous-verre avec un capteur de poids dedans. Le capteur déterminera la quantité de liquide dans le verre placé sur le sous-verre et enverra cette information via WiFi à une page Web. De plus, les montagnes russes ont. Dernière modifié: 2025-01-23 14:01

Enceinte Bluetooth DIY Pelican 1050 Dayton Audio : Depuis le premier projet que j'ai lancé, j'ai toujours voulu faire des enceintes Bluetooth. Je n'étais pas doué en électricité, alors j'ai commencé mes recherches et regardé des heures et des heures de vidéos. Des centaines de projets plus tard, je me sentais enfin assez à l'aise pour commencer. Dernière modifié: 2025-01-23 14:01

Alarme incendie: Am ales acesta tema deorece mi se pare un sistem util in casa oricarei persoane, care te poate feri, in anumite cazuri, de anumite probleme. Suis gandit acest proiect ca fiind un système robuste, relativement compact, si portable. Ca si privé de. Dernière modifié: 2025-01-23 14:01

1984 WeatherMan Pi : Ce lecteur de cassettes portable est maintenant un affichage météo ambiant IoT avec le style du début des années 80, affichant une "conditions actuelles" animation, défilement du graphique de la température et de la probabilité de pluie à travers la fenêtre de la bande. Lorsque les conditions météorologiques cha. Dernière modifié: 2025-01-23 14:01

DICE GAME THING :p : Bonjour, le nom est [SUPPRIMÉ] et je vais vous montrer comment faire un DICE THING sur le micro:bit. (c'est pour le cours de sciences du MYP3B) Alors, de quoi aurez-vous besoin pour le faire ? Vous aurez besoin d'un… Micro:bit Un ordinateur Quelques câbles Une conn. Dernière modifié: 2025-01-23 14:01
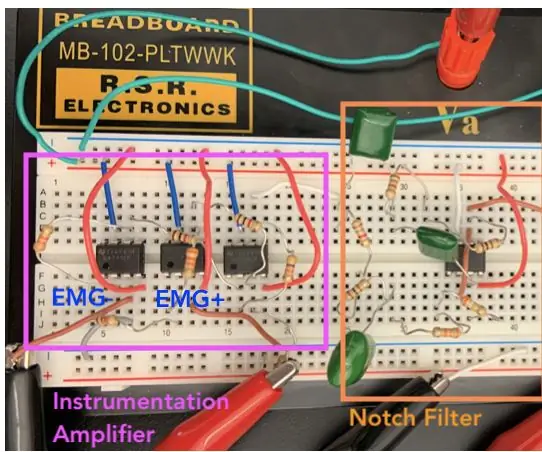
ECG automatisé simple (1 amplificateur, 2 filtres) : un électrocardiogramme (ECG) mesure et affiche l'activité électrique du cœur à l'aide de différentes électrodes placées sur la peau. Un ECG peut être créé à l'aide d'un amplificateur d'instrumentation, d'un filtre coupe-bande et d'un filtre passe-bas. Enfin, le filtré un. Dernière modifié: 2025-01-23 14:01
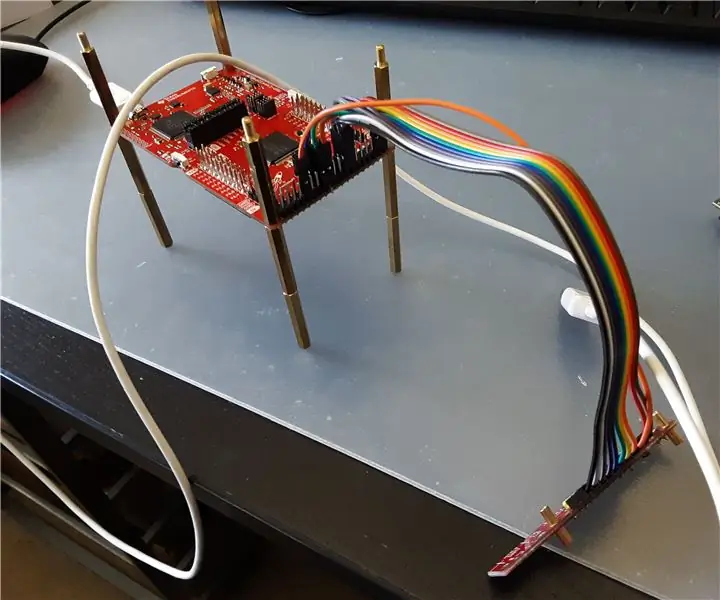
Partie 3 : GPIO : Assemblage ARM : Suiveur de ligne : TI-RSLK : Bonjour. Il s'agit du prochain volet où nous continuons à utiliser l'assembly ARM (au lieu d'un langage de niveau supérieur). L'inspiration pour ce Instructable est le laboratoire 6 du kit d'apprentissage du système robotique Texas Instruments, ou TI-RSLK. Nous utiliserons le micro. Dernière modifié: 2025-01-23 14:01
Model Boxer Engine : C'est un petit projet sympa qui vous permet de connaître les bases du fonctionnement d'un moteur dans un format simple. Dernière modifié: 2025-01-23 14:01

Arduino Basic Blink : cet exemple montre la chose la plus simple que vous puissiez faire avec un Arduino pour voir la sortie physique : il fait clignoter la LED intégrée. Dernière modifié: 2025-01-23 14:01

Casque Morse* : bipbipbipbip bip biptûûûtbipbip biptûûûtbipbip tûûûttûûûttûûût / bipbipbip tûûût biptûûûtbip biptûûûtb. Dernière modifié: 2025-01-23 14:01
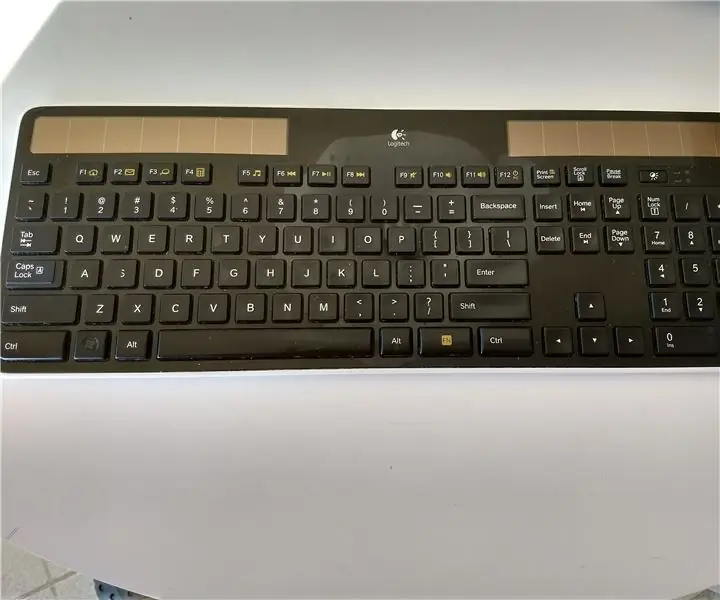
Démontage du clavier solaire Logitech K750 : il s'agit d'une méthode de démontage du clavier sans fil solaire Logitech K750. Si vous souhaitez simplement remplacer la batterie, vous n'avez pas besoin de démonter le clavier. Il existe plusieurs instructions en ligne sur la façon de retirer le support de batterie pour remplacer. Dernière modifié: 2025-01-23 14:01
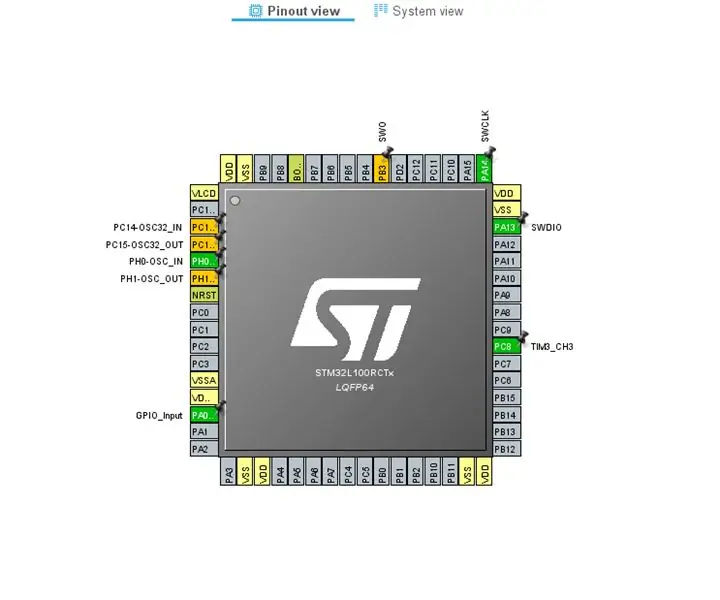
Atollic TrueStudio-Switch sur la LED en appuyant sur le bouton poussoir à l'aide de STM32L100: Dans ce tutoriel de STM32, je vais vous expliquer comment lire une broche GPIO de STM32L100, donc ici je vais en faire une LED à bord en appuyant sur le bouton poussoir. Dernière modifié: 2025-01-23 14:01
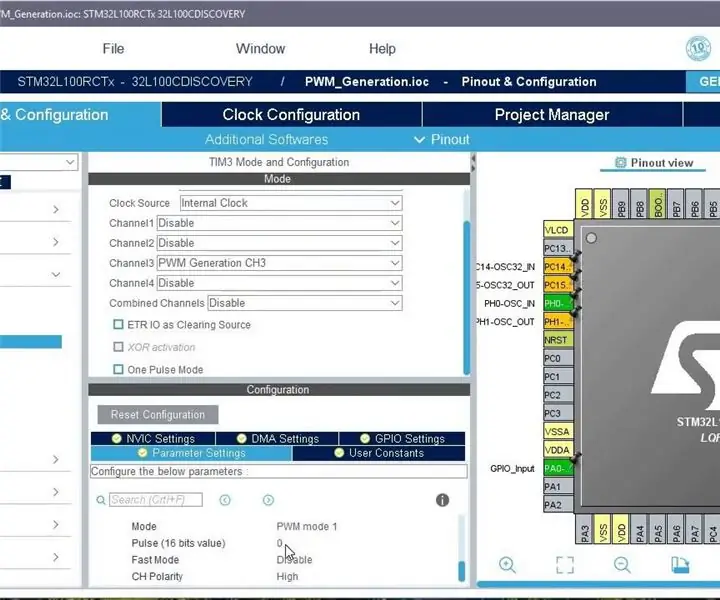
Tutoriel Atollic TrueSTUDIO-STM32L100 PWM: Dans ce tutoriel, nous allons vous expliquer comment utiliser PWM dans un microcontrôleur basé sur STM32, ici nous utilisons le kit 32L100discovery-Discovery avec le microcontrôleur STM32L100RCT6 dessus. Dernière modifié: 2025-01-23 14:01

Actionneur linéaire V2 : il s'agit d'une version mise à jour de ma conception originale d'actionneur linéaire. J'ai décidé de le rendre un peu plus joli (moins encombrant) et j'ai trouvé de très beaux raccords pour le fil M8 et le moteur pas à pas également utilisés sur les imprimantes 3D avec M8 z-rod. J'ai également fait un T8x8. Dernière modifié: 2025-01-23 14:01

E-Switch: Cette instructable a été créée pour répondre aux exigences du projet Makecourse à l'Université de Floride du Sud (www.makecourse.com). L'e-Switch est un appareil qui utilise un Arduino Uno, un récepteur IR et un Capteur de proximité HCSR04 à co. Dernière modifié: 2025-01-23 14:01

Robot de suivi des couleurs basé sur une roue omnidirectionnelle et OpenCV : j'utilise un châssis de roue omnidirectionnel pour implémenter mon suivi des couleurs, et j'utilise un logiciel mobile appelé OpenCVBot. Merci aux développeurs de logiciels ici, merci. OpenCV Bot détecte ou suit en fait tout objet en temps réel via le traitement d'image. Dernière modifié: 2025-01-23 14:01

PC de jeu portable dans une valise : Remarque : les étapes ne mettent en évidence que quelques conseils importants. Veuillez regarder la vidéo (ci-dessous) pour le processus de construction complet. Il n'y a pas besoin de spéci. Dernière modifié: 2025-01-23 14:01
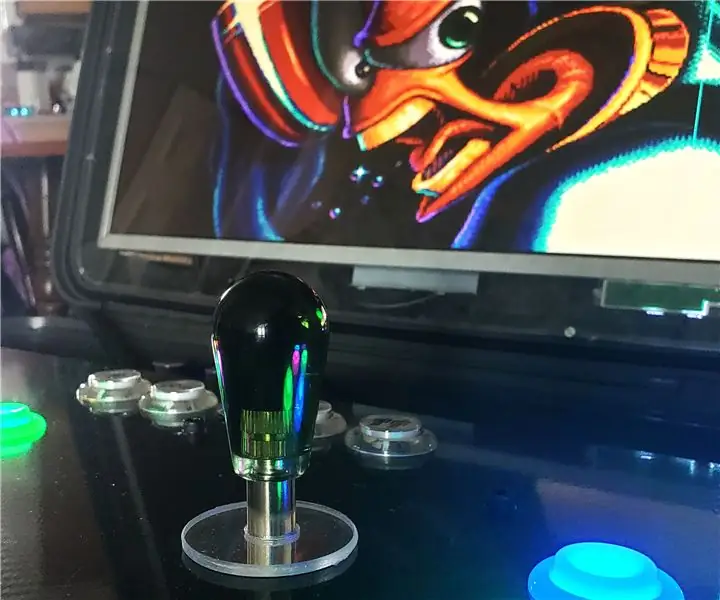
Portable Suitcase Arcade: Il y a un peu plus d'un mois, quelques collègues et moi parlions de machines d'arcade miniatures que nous avions vues chez Walmart, au prix de 250 $ à 500 $. J'ai pensé que ce serait un projet amusant de construire une arcade portable plus puissante, tout en la gardant à portée de main. Dernière modifié: 2025-01-23 14:01
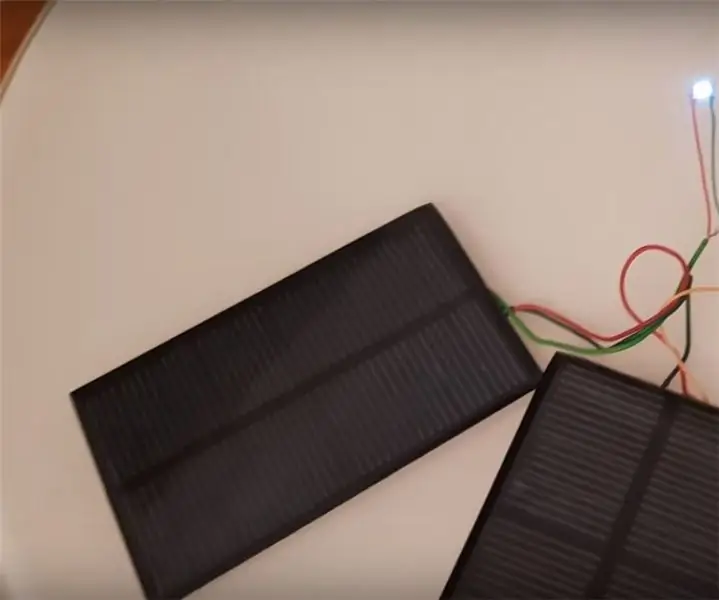
Led Solar Powered : système simple de récupération d'énergie utilisant des panneaux solaires et des led (sans batteries)Les panneaux solaires constitués généralement de deux couches de silicium - matériau semi-conducteur et une couche de séparation, sont câblés ensemble et assemblés en panneaux ou modules.Nous trouver. Dernière modifié: 2025-01-23 14:01

Odd or Even Hand Cricket Game Vs Intelligence Add Computer in C++: Hand Cricket / Odd or Even est un jeu populaire parmi nous dès l'école. Dans ce instructable, nous développons ce jeu en C++. C'est un jeu à un joueur dans lequel vous devez jouer contre un ordinateur qui n'est pas stupide. L'ordinateur ne met pas de nombre aléatoire. Dernière modifié: 2025-01-23 14:01
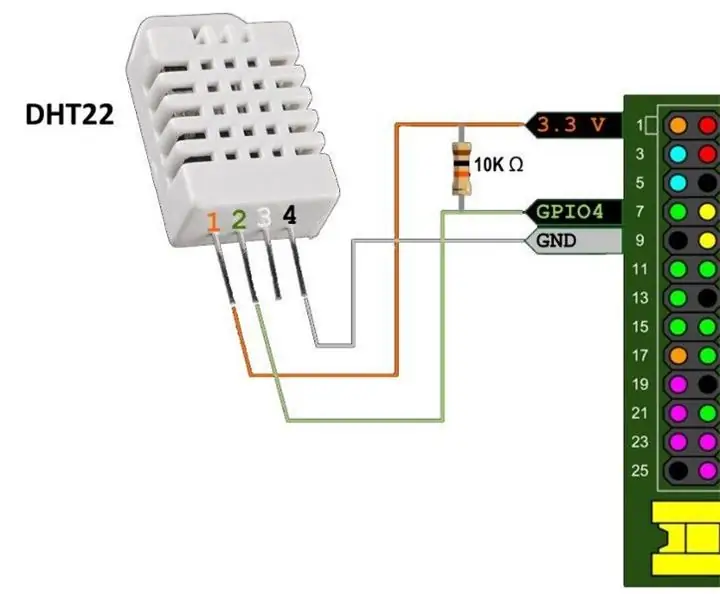
Surveillance de la température et de l'humidité à l'aide de Raspberry Pi : L'été approche et ceux qui n'ont pas de climatiseur doivent être prêts à contrôler manuellement l'atmosphère à l'intérieur. Dans cet article, je décris la façon moderne de mesurer les paramètres les plus importants pour le confort humain : la température et l'humidité. T. Dernière modifié: 2025-01-23 14:01

PardusARM Cloud : Aujourd'hui, je vais vous montrer comment utiliser PardusARM Cloud v0.8 avec Raspberry Pi 2. PardusARM Cloud est publié le 19 mai, ce qui est un jour spécial pour la République de Turquie car ce jour-là c'était Atatürk Souvenir et Sport Bayram. À mes débuts. Dernière modifié: 2025-01-23 14:01
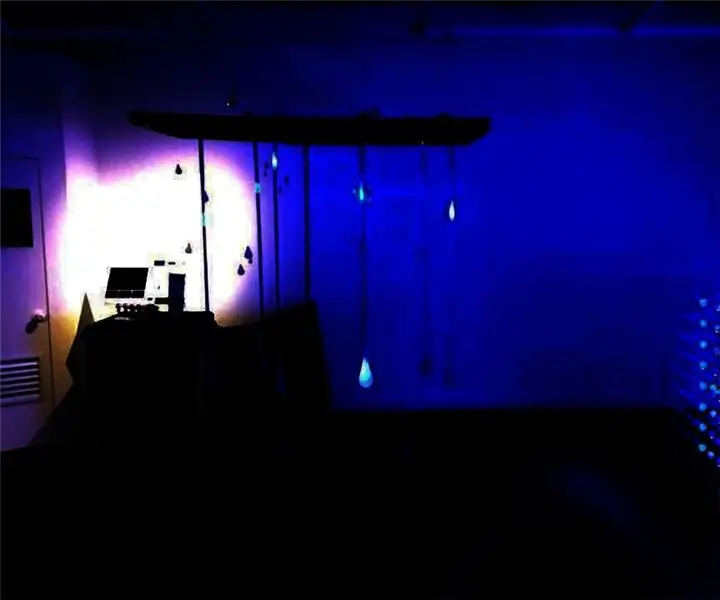
Rainy Song (incomplet) : Nous voulions obtenir une réponse positive en nous concentrant davantage sur le son dans un environnement où les gens pleuvraient dans le même son. Cependant, il ne pleut pas à chaque fois que vous voulez garantir que vous êtes concentré. Par conséquent, l'objectif est de payer. Dernière modifié: 2025-01-23 14:01
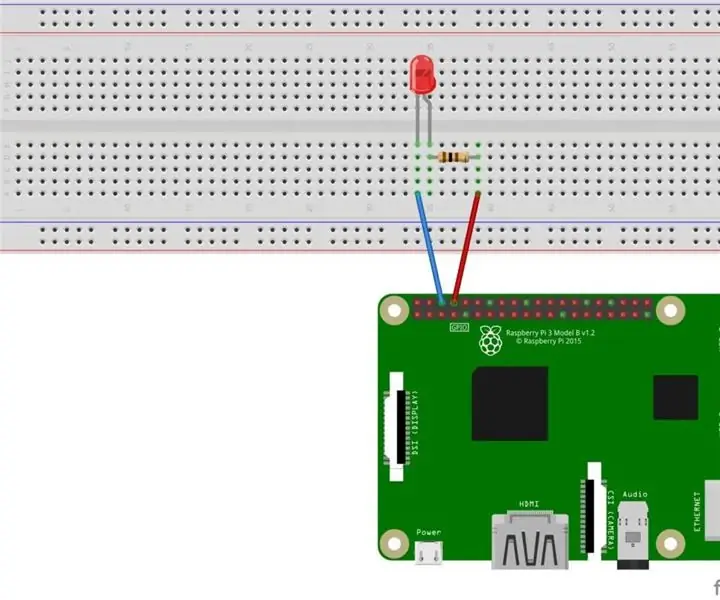
Clignotement LED avec Raspberry Pi | Comment utiliser les broches GPIO sur Raspberry Pi : Salut les gars dans cette instructables, nous allons apprendre à utiliser les GPIO de Raspberry pi. Si vous avez déjà utilisé Arduino, vous savez probablement que nous pouvons connecter un commutateur LED, etc. à ses broches et le faire fonctionner comme. faire clignoter la LED ou obtenir l'entrée du commutateur donc. Dernière modifié: 2025-01-23 14:01
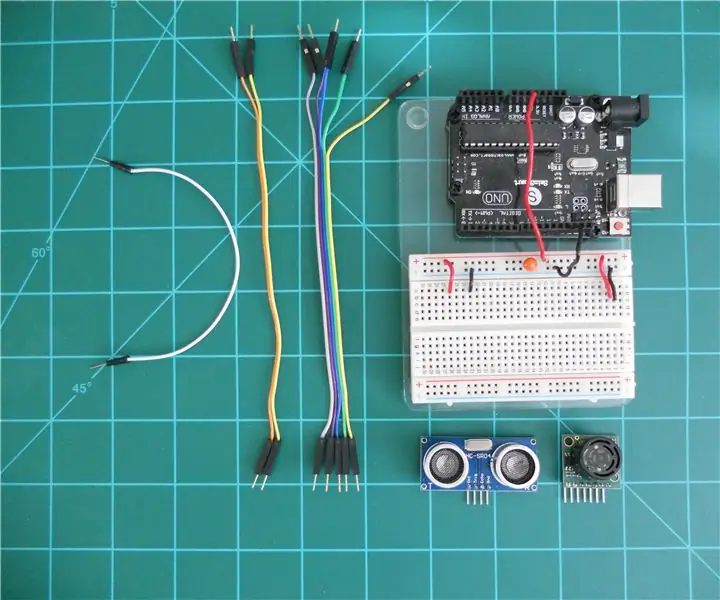
Comparaison des télémètres sonar LV-MaxSonar-EZ et HC-SR04 avec Arduino : je trouve que de nombreux projets (en particulier les robots) nécessitent ou peuvent bénéficier de la mesure de la distance à un objet en temps réel. Les télémètres sonar sont relativement peu coûteux et peuvent être facilement interfacés à un microcontrôleur comme l'Arduino. En ce. Dernière modifié: 2025-01-23 14:01

Turbine électrostatique améliorée fabriquée à partir de matières recyclables : il s'agit d'une turbine électrostatique (EST) entièrement construite à partir de rayures qui convertit le courant continu haute tension (CCHT) en un mouvement rotatif à grande vitesse. Mon projet a été inspiré par le moteur Jefimenko Corona qui est alimenté par l'électricité de l'atmosphère. Dernière modifié: 2025-01-23 14:01
![Contrôleur PC Groove Coaster [PARTIE 1 : Matériel Booster] : 9 étapes](https://i.howwhatproduce.com/images/011/image-30776-j.webp)
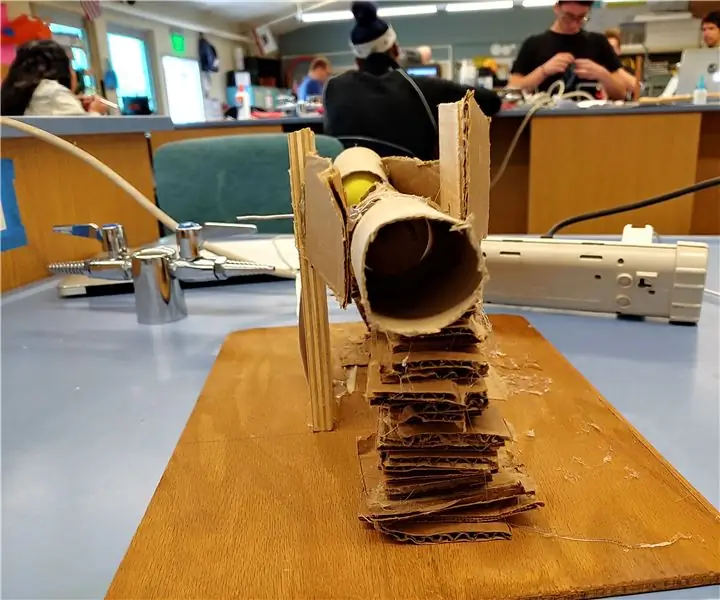
Contrôleur Groove Coaster PC [PARTIE 1 : Booster Hardware] : Travailler sur un contrôleur PC pour la prochaine version de Groove Coaster PC sur SteamVoici un petit tutoriel sur la façon d'assembler le matériel pour un booster basé sur une clé d'arcade. Dernière modifié: 2025-01-23 14:01
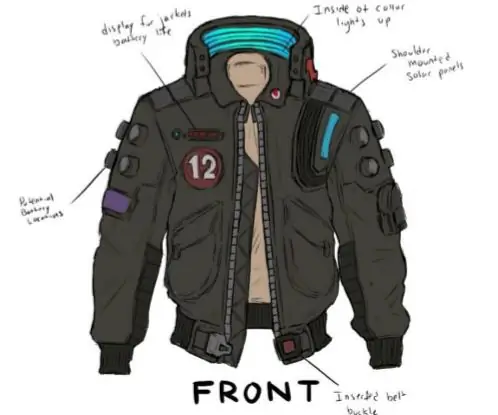
Veste technique : cette instructable a été créée pour répondre aux exigences du projet Makecourse-Art de l'Université de Floride du Sud (www.makecourse-art.com). Notre projet est une veste qui met en œuvre la technologie pour produire un punk low-tech rock futuriste. Dernière modifié: 2025-01-23 14:01
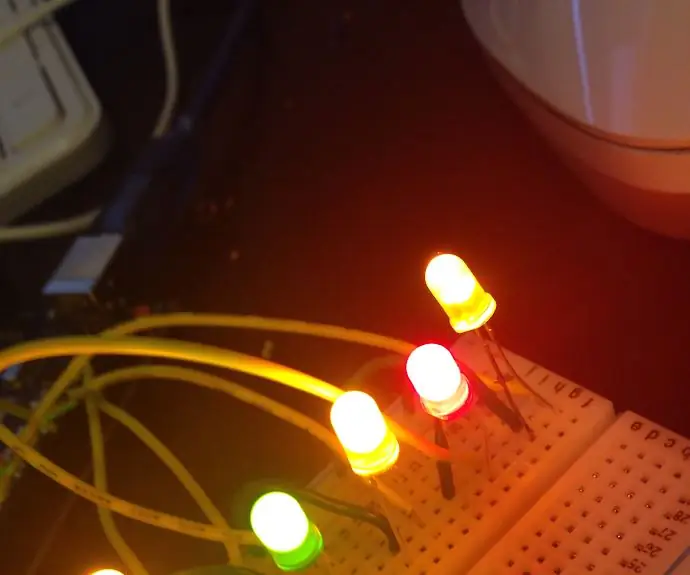
Motifs LED (Différents Motifs Lumineux) : L'idée : Mon projet est un motif de couleur LED. Le projet contient 6 LED qui sont toutes alimentées et communiquent avec l'Arduino. Il y a 4 motifs différents qui défileront et seront joués en boucle. Quand un modèle se termine, une autre prise. Dernière modifié: 2025-01-23 14:01

HeadBot - un robot auto-équilibré pour l'apprentissage et la sensibilisation des STEM : Headbot - un robot auto-équilibré de deux pieds de haut - est le fruit de l'équipe de robotique de South Eugene (SERT, FRC 2521), une équipe de robotique compétitive du lycée dans le FIRST Concours de robotique, d'Eugene, Oregon. Ce robot de vulgarisation populaire fait ré. Dernière modifié: 2025-01-23 14:01
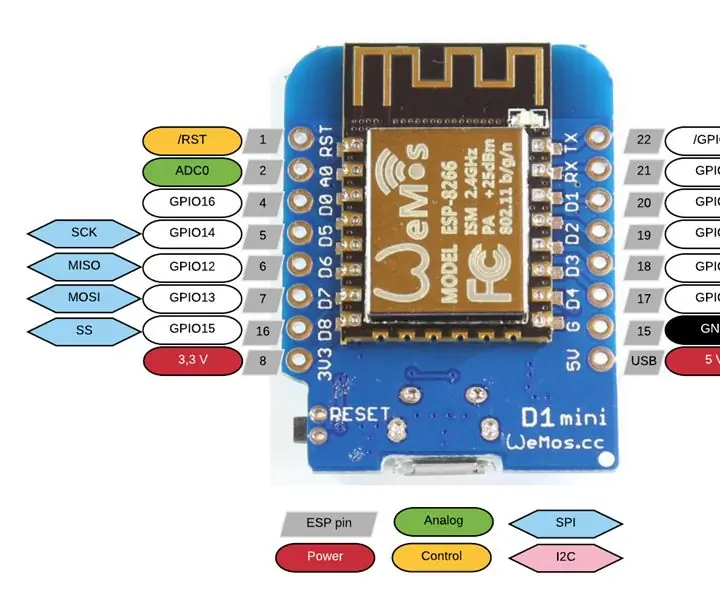
Capteur Wemos DHT11 PIR avec relais : Ce sont des instructions sur la façon de câbler et de programmer un Wemos mini D1 afin qu'il puisse lire la température à partir d'un DHT11 et que vous puissiez manipuler les informations via l'application Blynk via WIFI. L'utilisation de l'application Blynk permettra d'afficher graphiquement les valeurs (Hum. Dernière modifié: 2025-01-23 14:01